Кинематика. Равноускоренное прямолинейное движение
Готовиться с нами - ЛЕГКО!
Теоретическая справка
#957
Основные формулы
Равномерное прямолинейное движение
Перемещение:
 |
Зависимость координаты от времени:
 |
Равноускоренное прямолинейное движение
Ускорение тела:
 |
Зависимость скорости от времени:
 |
Зависимость координаты от времени:
 |
Перемещение:
 |
Перемещение, «формула без времени»:
 |
Перемещение, «формула без ускорения»:
 |
Механическое движение
Механическое движение тела — изменение положения тела в пространстве относительно других тел с течением времени. При механическом движении тела взаимодействуют по законам механики.
Кинематика описывает геометрические свойства движения без учета причин, которые его вызывают. Главной задачей кинематики является математическое определение положения и характеристик движения точек или тел во времени.
Материальная точка — это тело, размеры которого очень малы по сравнению с расстоянием, которое оно прошло, поэтому этими размерами можно пренебречь. В кинематике все тела принято рассматривать как материальные точки.
Основные понятия
- Траектория — линия, вдоль которой движется тело.
- Путь — длина участка траектории, пройденного телом за определенный промежуток времени.
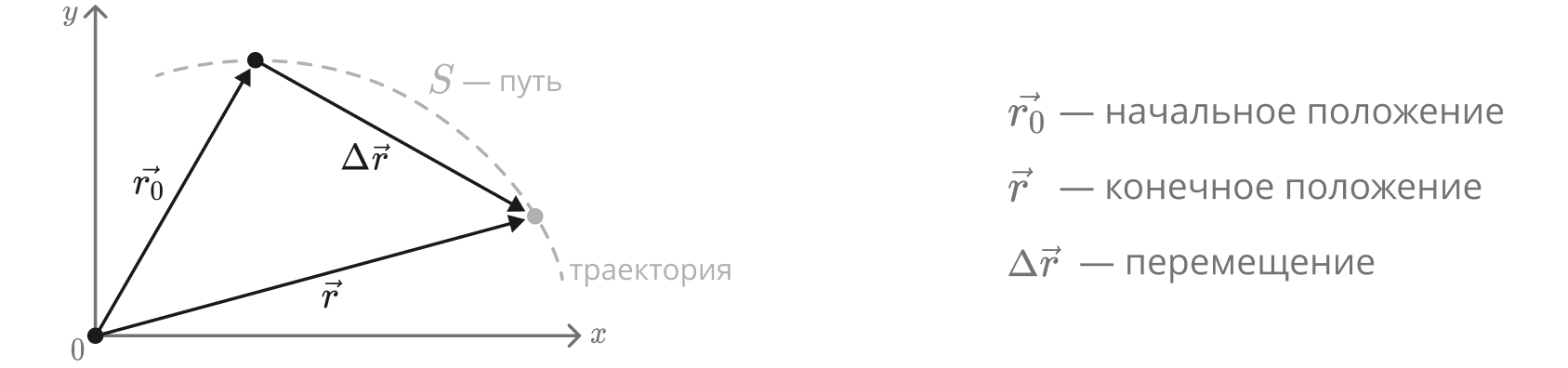
- Радиус-вектор — вектор, проведенный из начала координат в место расположения материальной точки. Положение материальной точки в пространстве задается радиус-вектором.
- Перемещение — вектор, соединяющий начальное и конечное положение тела.
- Система отсчета — тело отсчета (начало координат) вместе с жестко связанной с ним системой координат и часами.
Для лучшего понимания разницы между понятиями пути и перемещения снизу изображен поясняющий рисунок.
Кинематические характеристики движения материальной точки
Перемещение — вектор, соединяющий два последовательных положения материальной точки на траектории. Перемещение является вектором-разностью радиус-векторов конечного и начального положений тела.
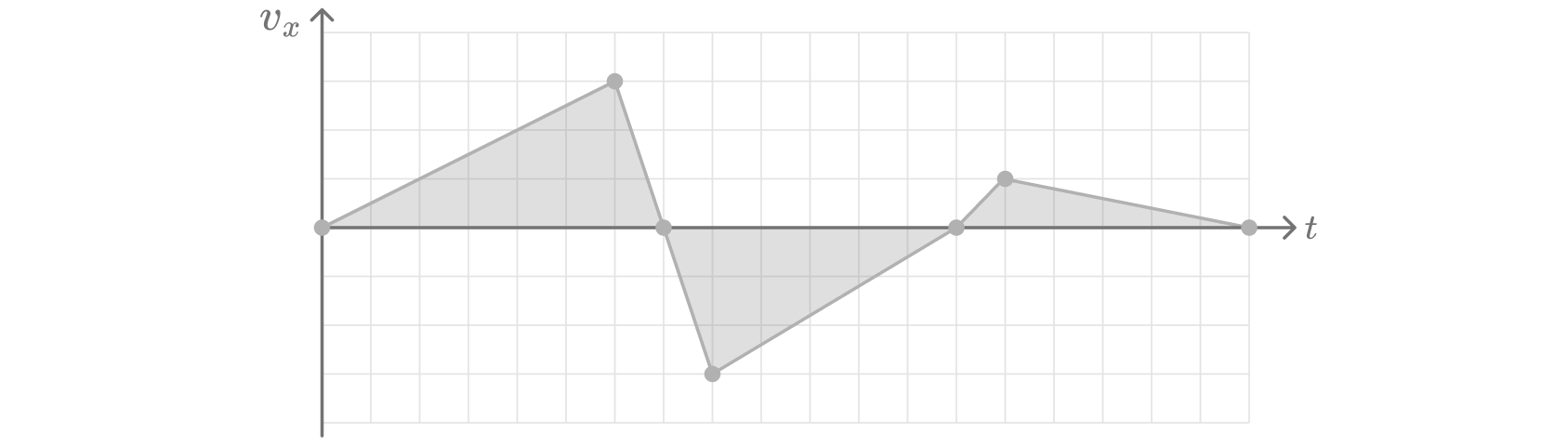
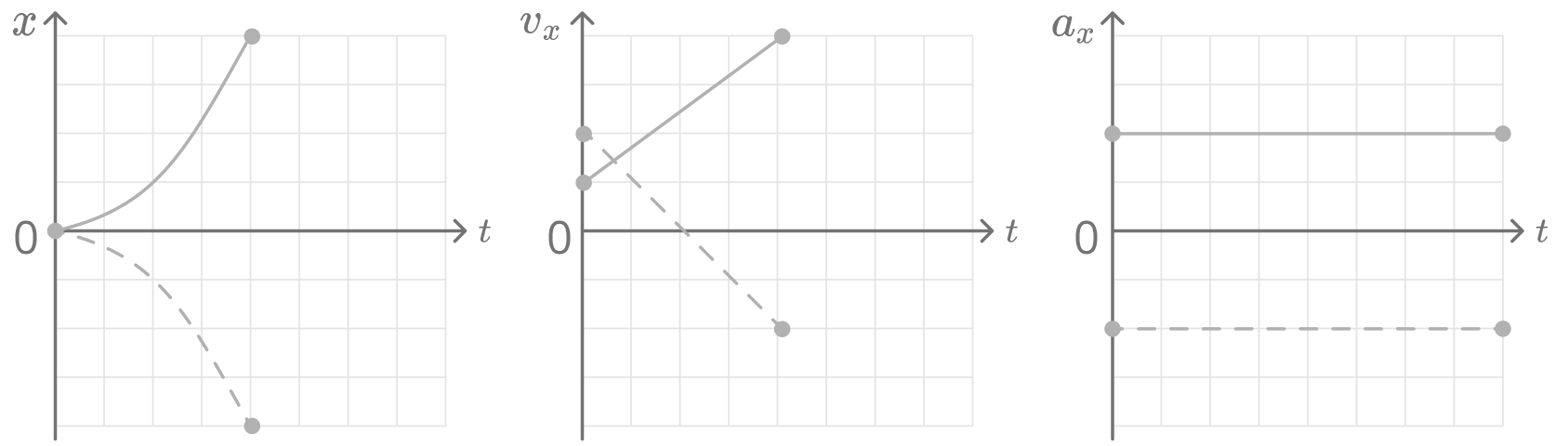
Графический метод нахождения перемещения и пройденного пути: для определения проекции
перемещения  нужно найти численно равную ей площадь под графиком проекции скорости
нужно найти численно равную ей площадь под графиком проекции скорости
 .
.
Скорость — векторная физическая величина, которая характеризует быстроту изменения положения материальной точки в пространстве с течением времени.
 |
Единицы измерения:
![[v] =](/api/latex-service/v1/GetSession/224038/index-cdf79d0d9fa20bd10d061eb318badb8d.svg) м/с (метр в секунду).
м/с (метр в секунду).
Вектор скорости — это первая производная от радиус-вектора по времени.
Ускорение — векторная физическая величина, которая характеризует быстроту изменения скорости по величине и по направлению.
 |
где  и
и  — конечная и начальная скорость соответственно.
— конечная и начальная скорость соответственно.
В проекции на ось  :
:
 |
где  и
и  — проекция конечной и начальной скорости на ось
— проекция конечной и начальной скорости на ось  соответственно.
соответственно.
Единицы измерения:
![2
[a] = м/с](/api/latex-service/v1/GetSession/224038/index-e84f6d614b2275cb2b6e1f2f6725d5f0.svg) (метр в секунду за секунду).
(метр в секунду за секунду).
Вектор ускорения — это первая производная от скорости по времени и вторая производная от радиус-вектора по времени.
Вектор ускорения сонаправлен с вектором скорости при равноускоренном движении и противоположно направлен при равнозамедленном движении.
Прямолинейное равномерное движение
Прямолинейное равномерное движение (ПРД) — движение, при котором тело за равные промежутки времени совершает одинаковые перемещения.
Траектория ПРД — прямая. При этом скорость остается постоянной  .
.
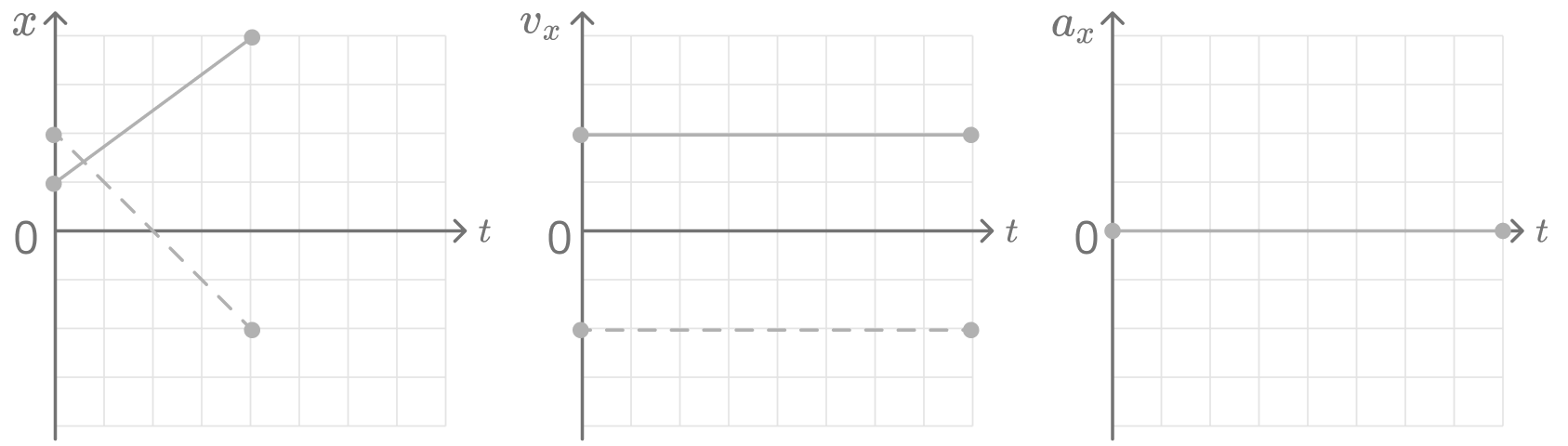
Уравнение движения материальной точки:
 |
Скорость движения материальной точки:
 |
Ускорение материальной точки:
 |
Пройденный путь:
 |
Прямолинейное равноускоренное движение
Прямолинейное равноускоренное движение (ПРУД) материальной точки — движение с постоянным
вектором ускорения  . Траекторией ПРУД является парабола.
. Траекторией ПРУД является парабола.
Уравнение движения материальной точки:
 |
Скорость движения материальной точки:
 |
Ускорение материальной точки:
 |
Перемещение:
 |
Перемещение, «формула без времени»:
 |
Перемещение, «формула без ускорения»:
 |
Выведем все формулы для перемещения при ПРУД. Для этого вспомним определение ускорения:
 |
Данная зависимость является линейной, потому что переменная  имеет первую степень. То есть
график будет иметь вид прямой. Сравним с общим видом уравнения прямой
имеет первую степень. То есть
график будет иметь вид прямой. Сравним с общим видом уравнения прямой  .
.
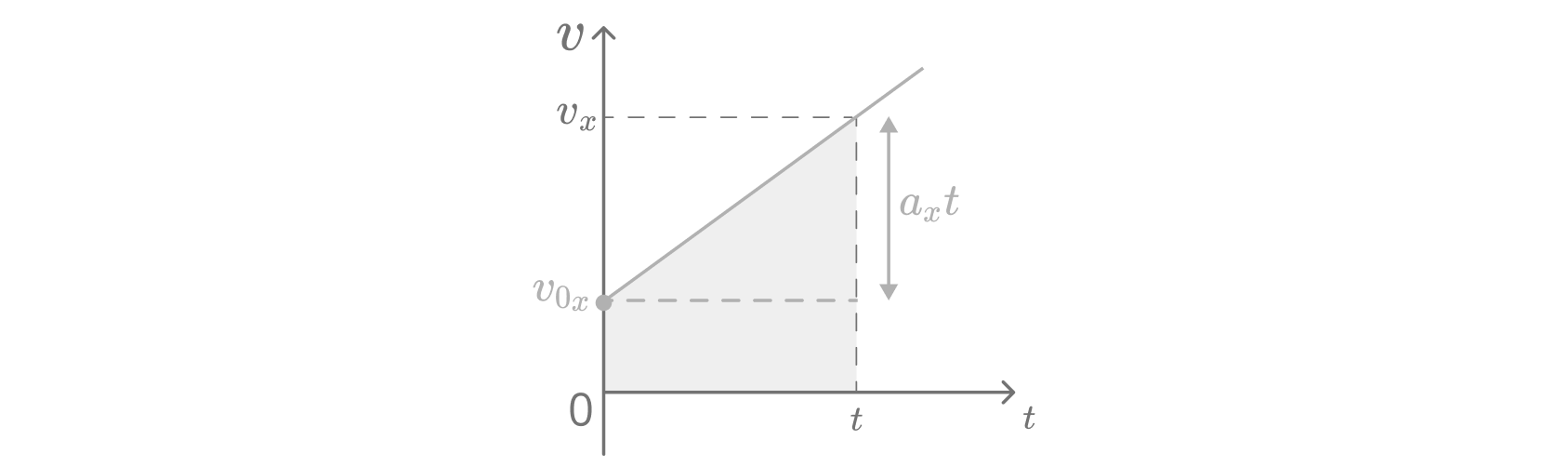
Отрезок от  до
до  равен разности этих скоростей:
равен разности этих скоростей:  . Мы уже знаем, что перемещение
при ПРУД можно найти как площадь фигуры под графиком. Разобьем синюю фигуру на две части —
прямоугольник со сторонами
. Мы уже знаем, что перемещение
при ПРУД можно найти как площадь фигуры под графиком. Разобьем синюю фигуру на две части —
прямоугольник со сторонами  и
и  и треугольник с основанием
и треугольник с основанием  и высотой
и высотой  . Теперь найдем
площадь каждой фигуры и найдем сумму площадей.
. Теперь найдем
площадь каждой фигуры и найдем сумму площадей.
 |
Получим формулу для перемещения при ПРУД материальной точки:
 |
Теперь посмотрим на синюю фигуру под графиком как на трапецию и найдем ее площадь (полусумма оснований на высоту). Тогда получим «формулу без ускорения»:
 |
Обе формулы работают и в векторном представлении. Осталась еще одна формула для перемещения при ПРУД. Чтобы ее получить, запишем уравнение для перемещения при, выведенное ранее, в векторном виде:
 |
Домножим обе части на вектор  :
:
 |
Представим  как разность векторов конечной и начальной скоростей:
как разность векторов конечной и начальной скоростей:
 |
Можно заметить, что выражение можно упростить, используя формулу разности квадратов:
 |
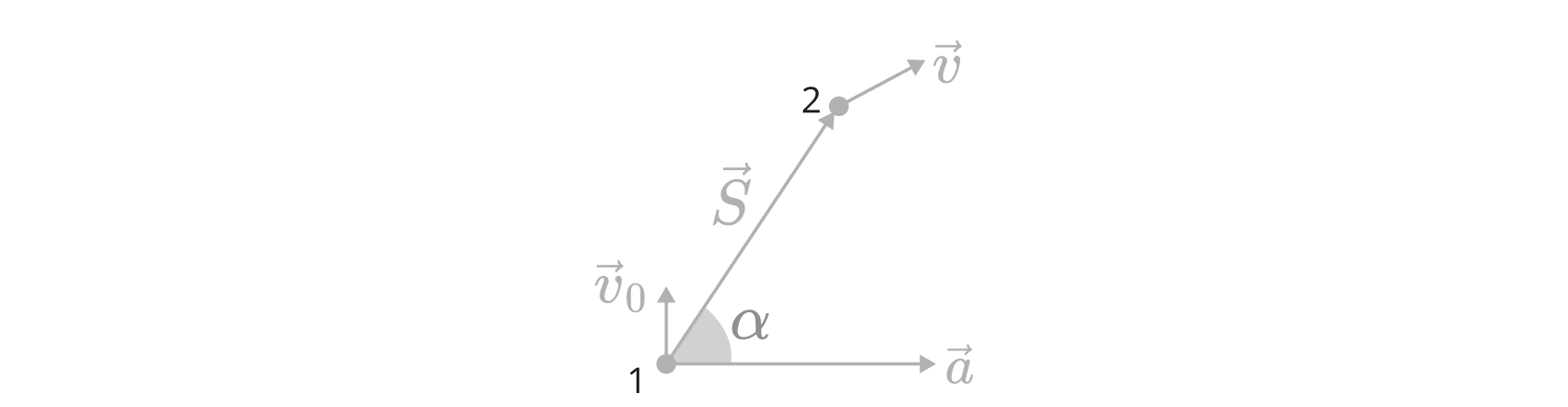
Произведение двух векторов  называется скалярным и расписываются как
называется скалярным и расписываются как  , где угол
, где угол  является углом между вектором ускорения
является углом между вектором ускорения  и перемещения
и перемещения  . Скалярные произведения
. Скалярные произведения  и
и
 расписываются как
расписываются как  и
и  соответственно. Тогда:
соответственно. Тогда:
 |
Для одной оси эта формула записывается в проекциях:
 |