Движение по окружности
Готовиться с нами - ЛЕГКО!
Теоретическая справка
#605
Основные формулы
Угловая скорость:
 |
Связь линейной и угловой скорости:
 |
Период вращения при равномерном движении по окружности:
 |
Частота вращения:
 |
Центростремительное (нормальное) ускорение:
 |
Тангенциальное ускорение:
 |
Полное ускорение в векторном виде:
 |
Полное ускорение в скалярном виде:
 |
Равномерное движение по окружности
Равномерное движение по окружности — частный случай криволинейного движения, когда вектор скорости тела не изменяется по модулю (длина вектора постоянна), а изменяет лишь свое направление. Таким образом, выполняется следующее соотношение:
 |
Угловая скорость при равномерном движении по окружности — это отношение угла поворота радиус вектора направленного за некоторый промежуток времени:
 |
При неравномерном движении по окружности угловая скорость вводится как производная угла поворота по времени:
 |
Единицы измерения: ![[ω]=](/api/latex-service/v1/GetSession/159309/index-a38ae76093f406e7e6da1dcc41430e0b.svg) рад/c (радиан в секунду)
рад/c (радиан в секунду) 

Связь линейной и угловой скорости
Угол в радианной мере вводится как отношение длины дуги окружности к ее радиусу:
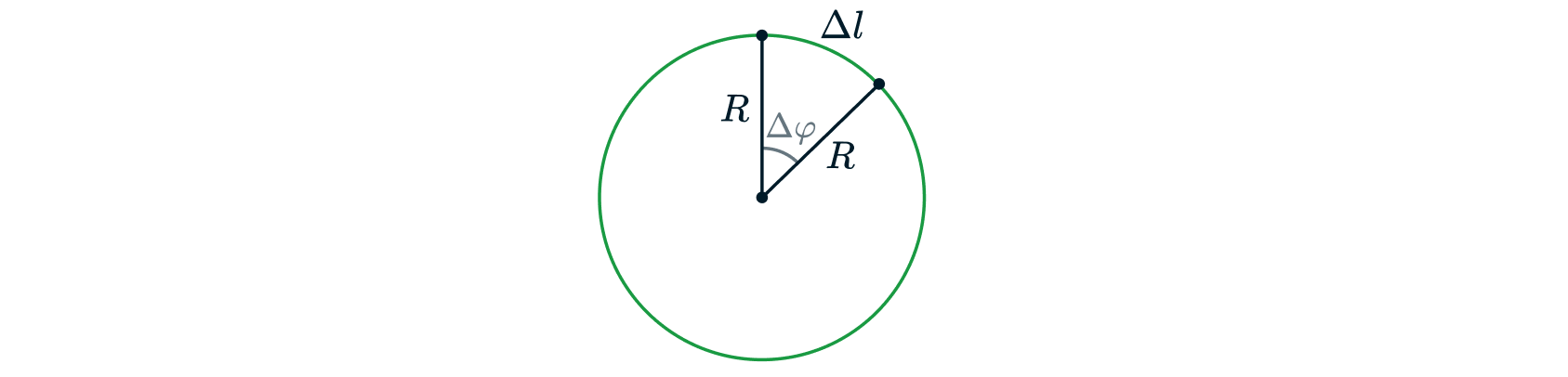
 |
Поскольку движение равномерное, длину дуги можно выразить через линейную скорость и время движения:
 |
Выразим линейную скорость:
 |
Откуда видна связь линейной и угловой скорости:
 |
Период обращения — это время одного полного оборота. То есть для равномерного движения по окружности — это отношение времени обращения к числу оборотов:
 |
Единицы измерения: ![[T]=](/api/latex-service/v1/GetSession/159309/index-b9a134c5f7979d66d3b2027d4eb0304a.svg) с (секунда).
с (секунда).
При равномерном движении эта формула может принимать и другой вид.
Пусть двигаясь со скоростью  по окружности, тело совершает один оборот
за
по окружности, тело совершает один оборот
за  секунд. Таким образом, оно проходит расстояние, равное длине
окружности
секунд. Таким образом, оно проходит расстояние, равное длине
окружности  .
.
Обращая это выражение в формулу, получим:
 |
Частота вращения — это величина, обратная периоду. Частота показывает, сколько полных оборотов совершается в единицу времени.
 |
Единицы измерения: ![[ν]=](/api/latex-service/v1/GetSession/159309/index-5eeb71137091dab200ba89663be1cdf7.svg) об/c (оборот в секунду) Гц (герц)
об/c (оборот в секунду) Гц (герц) 

Также свяжем угловую скорость с частотой и периодом:
 |
Центростремительное (нормальное) ускорение
При равномерном движении по окружности направление вектора скорости
постоянно меняется. Это происходит из-за наличия центростремительного
(нормального) ускорения, направленного перпендикулярно вектору
скорости  в центр окружности. В дальнейшем будем называть его
нормальным.
в центр окружности. В дальнейшем будем называть его
нормальным.
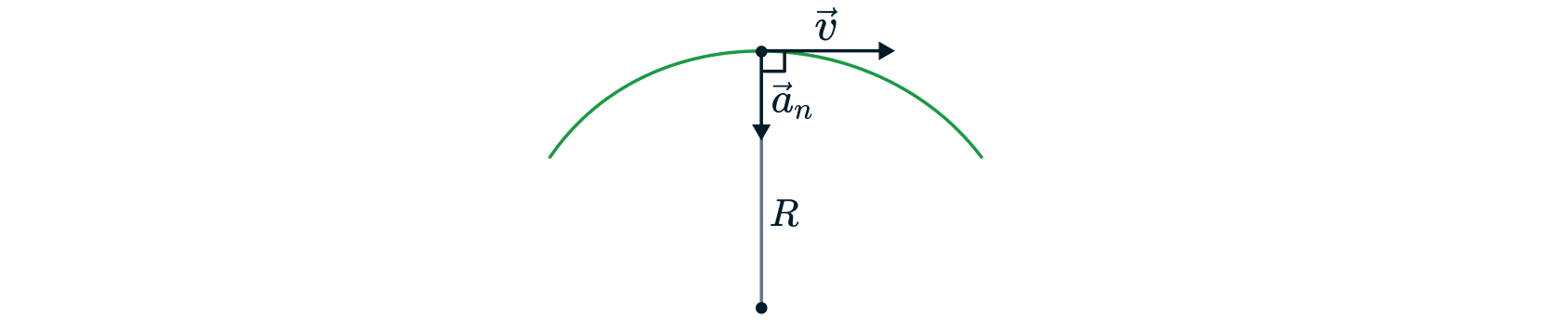
Нормальное ускорение вычисляется по формуле:
 |
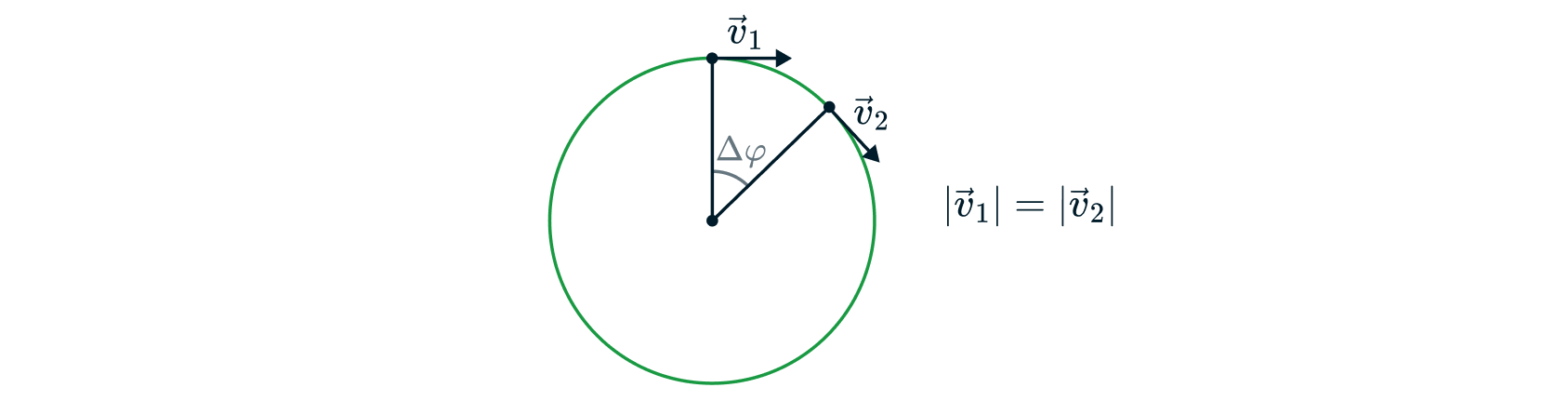
Давайте ее выведем. Для этого рассмотрим тело, движущееся по окружности
с постоянной угловой скоростью, в два момента времени. Проведем
радиус-векторы  и
и  к положениям тела в эти моменты времени,
векторы скорости
к положениям тела в эти моменты времени,
векторы скорости  и
и  , отложим их изменение
, отложим их изменение  и
и  и отметим
равные углы.
и отметим
равные углы.
В результате получим следующий рисунок:
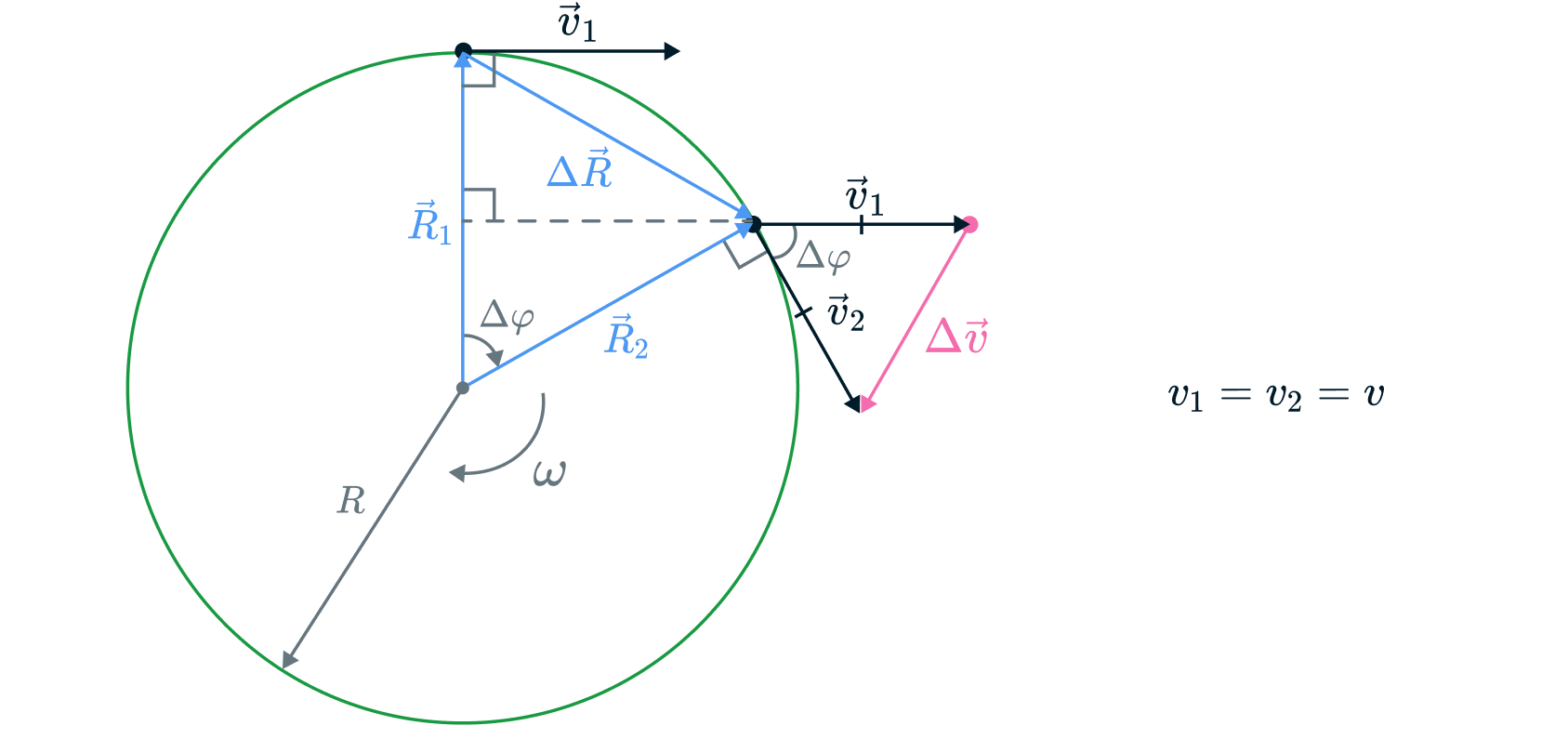
Вспомним, что поскольку движение по окружности равномерное, модуль линейной скорости постоянен. Поэтому:
 |
Тогда заметим, что полученные векторные треугольники подобны.
Действительно,  ,
,  , а также равны углы между
соответствующими катетами. Тогда запишем подобие:
, а также равны углы между
соответствующими катетами. Тогда запишем подобие:
 |
Разделим обе части полученного выражения на  :
:
 |
Заметим, что по определению скорость  — это отношение изменения
радиус-вектора
— это отношение изменения
радиус-вектора  к изменению времени
к изменению времени  , а ускорение
, а ускорение  — отношение
изменения вектора скорости
— отношение
изменения вектора скорости  к изменению времени
к изменению времени  . Учитывая это,
перепишем имеющееся выражение:
. Учитывая это,
перепишем имеющееся выражение:
 |
Осталось заметить, что полученное ускорение и является нормальным. Также, используя связь между угловой и линейной скоростями, получим второй вид этой формулы:
 |
Ускорение при криволинейном движении
Криволинейное движение — это движение, траектория которого представляет некоторую кривую. Чтобы описать такое движение, траектория рассматривается как набор участков окружностей.
При этом, радиусы  и
и  называются радиусами кривизны траектории в
соответствующих точках.
называются радиусами кривизны траектории в
соответствующих точках.
В общем случае при криволинейном движении скорость изменяется по величине и по направлению, поэтому полное ускорение имеет две компоненты — нормальное ускорение и тангенциальное ускорение. Рассмотрим их подробнее.
Нормальное ускорение — компонента ускорения, характеризующая быстроту изменения направления вектора скорости для траектории с кривизной, направленное перпендикулярно (по нормали) вектору скорости к центру кривизны траектории.
 |
Единицы измерения: ![2
[an]= м/c](/api/latex-service/v1/GetSession/159309/index-bd8be64515e89c5c2a12c9698322d8a6.svg) (метр в секунду в квадрате).
(метр в секунду в квадрате).
Тангенциальное ускорение — компонента ускорения, направленная по
касательной к траектории движения. Если модуль скорости увеличивается,
то тангенциальное ускорение  направлено по скорости, а если модуль
уменьшается, то тангенциальное ускорение
направлено по скорости, а если модуль
уменьшается, то тангенциальное ускорение  направлено против
скорости.
направлено против
скорости.
 |
Единицы измерения: ![2
[aτ]= м/c](/api/latex-service/v1/GetSession/159309/index-38c2086f119a0938730d07b2bb12117d.svg) (метр в секунду в квадрате).
(метр в секунду в квадрате).
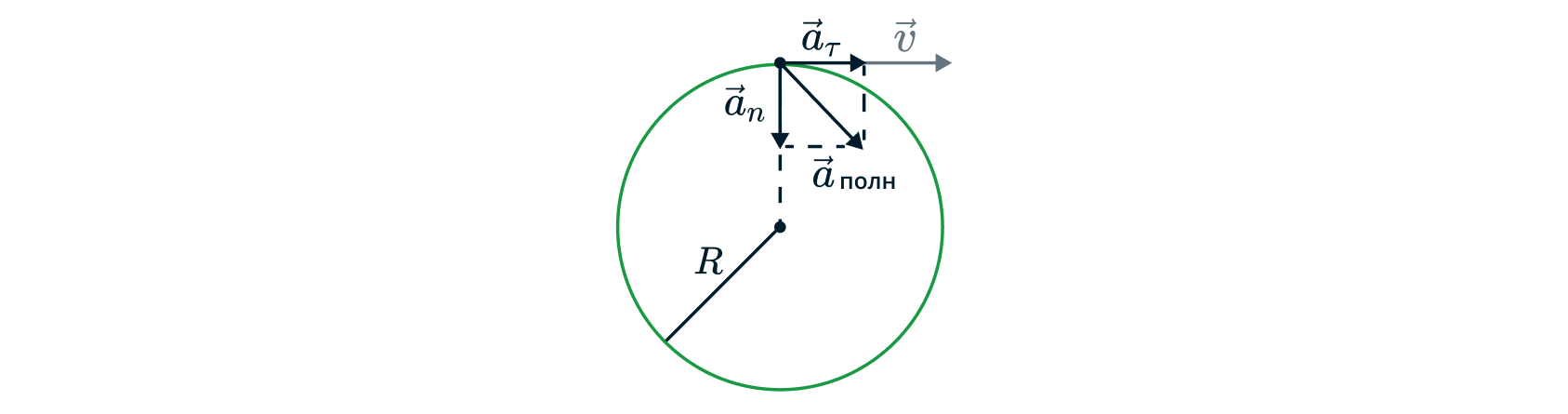
Полное ускорение тела, движущегося по окружности, равно векторной сумме тангенциального и нормального ускорений.
 |
Если учесть, что  , то воспользовавшись теоремой Пифагора,
получим:
, то воспользовавшись теоремой Пифагора,
получим:
 |
Кинематические соотношения при движении по окружности
Соотношение 1: диск
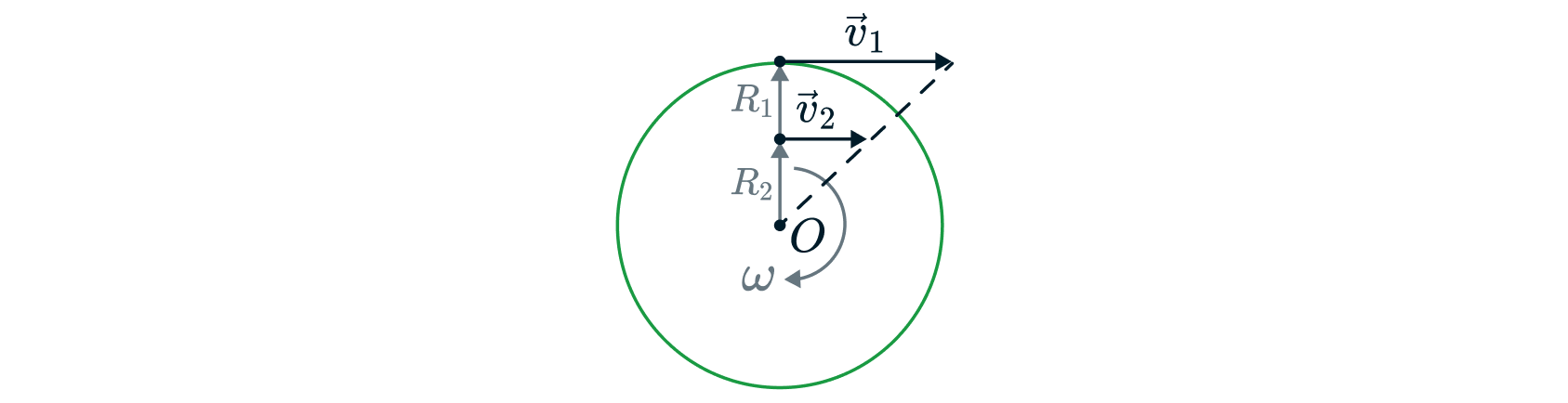
Все точки, принадлежащие одному и тому же диску, вращаются с одинаковой угловой скоростью:
 |
С учетом связи линейной и угловой скорости можно сделать вывод, что линейные скорости точек относятся прямо пропорционально их радиусам:
 |
Из этого соотношения видно, что чем ближе точка к центру окружности, тем меньше ее линейная скорость.
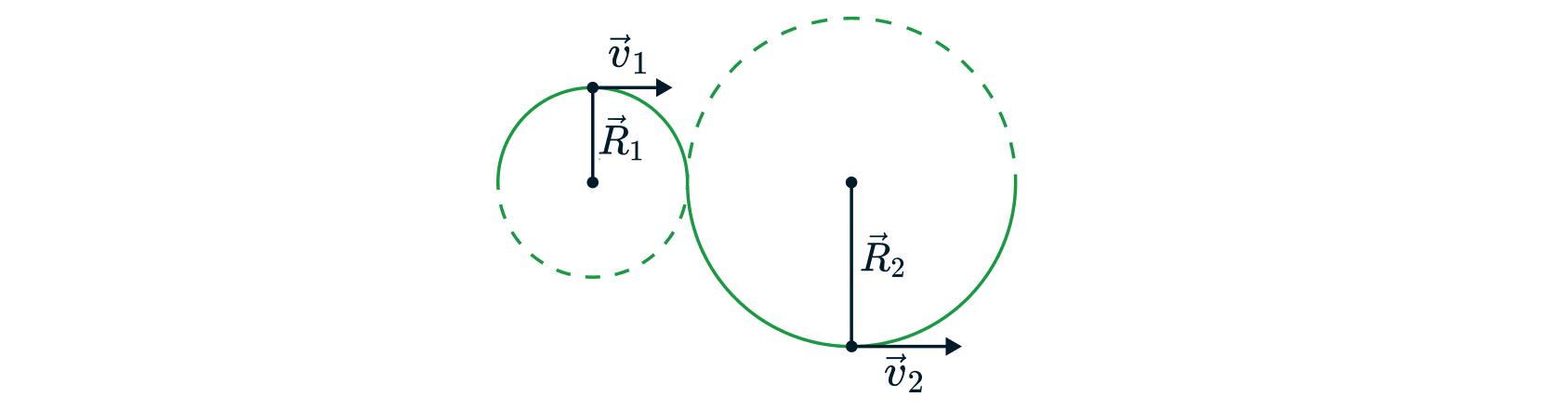
Соотношение 2: ременная передача
Поскольку шкивы соединены ремнем и ремень не растягивается и не сжимается, линейные скорости всех точек ремня одинаковы:
 |
При этом угловые скорости шкивов могут быть как разными  , так и
одинаковыми
, так и
одинаковыми  .
.
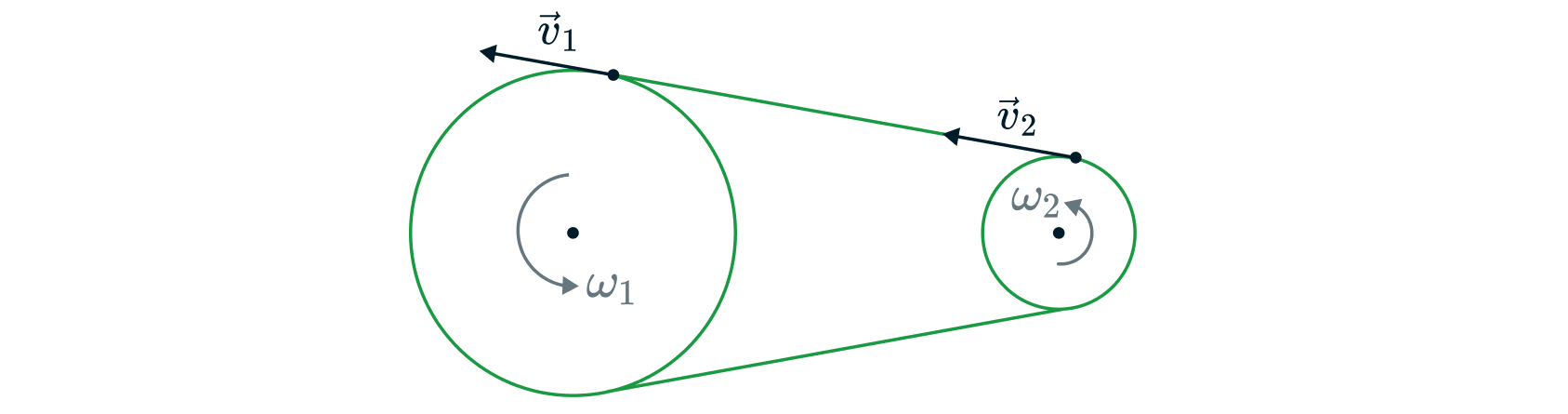
Соотношение 3: зубчатая передача
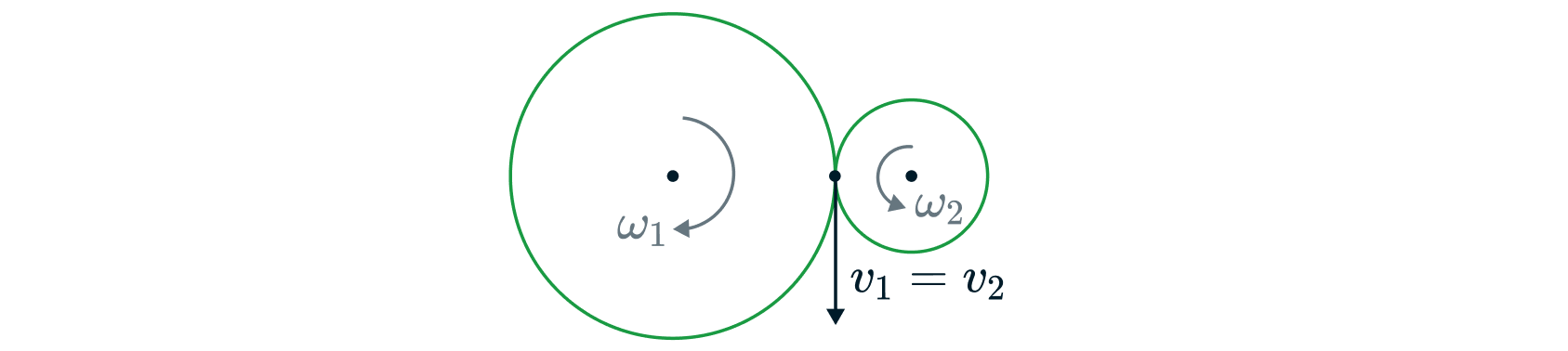
В точке контакта колес линейные скорости равны:
 |
При этом угловые скорости колес могут быть как разными  , так и
одинаковыми
, так и
одинаковыми  .
.
Примеры решения задач
Задача 1
Диск равномерно вращается и за время  мин совершает
мин совершает  оборотов.
оборотов.
Найдите:
1) Частоту вращения  ;
;
2) Угловую скорость вращения  ;
;
3) Период вращения диска  ;
;
4) Линейную скорость  точек диска, расположенных на расстоянии
точек диска, расположенных на расстоянии
 м от центра диска;
м от центра диска;
5) Ускорение  точек диска, расположенных на расстоянии
точек диска, расположенных на расстоянии  см от
центра диска.
см от
центра диска.
Решение
Используя определение, найдем частоту:
 |
угловую скорость:
 |
и период вращения:
 |
Используя связь линейной и угловой скоростей, а также формулу для нормального ускорения, найдем линейную скорость:
 |
а также нормальное ускорение:
 |
Задача 2
Космонавт на тренировке, сидя в центрифуге, вращается по окружности
радиуса 100 м, причем его скорость меняется по закону:  . Найдите
полное ускорение, которое испытывает космонавт через 20 секунд после
начала тренировки.
. Найдите
полное ускорение, которое испытывает космонавт через 20 секунд после
начала тренировки.
Решение
Заметим, что модуль скорости меняется в зависимости от времени — это значит, что появляется тангенциальное ускорение. Так как космонавт движется по окружности, то возникает и центростремительное ускорение. Теперь, когда мы знаем какие компоненты ускорения присутствуют в задаче, можем перейти к вычислениям. Скорость через 20 секунд:
 |
Тогда нормальное ускорение в этот момент времени будет равно:
 |
Тангенциальное ускорение соответственно равно:
 |
В конечном итоге вычисляем полное ускорение через теорему Пифагора:
 |